




Video: Actuation Test with Heat Masking
The project is developing along two parallel tracks:
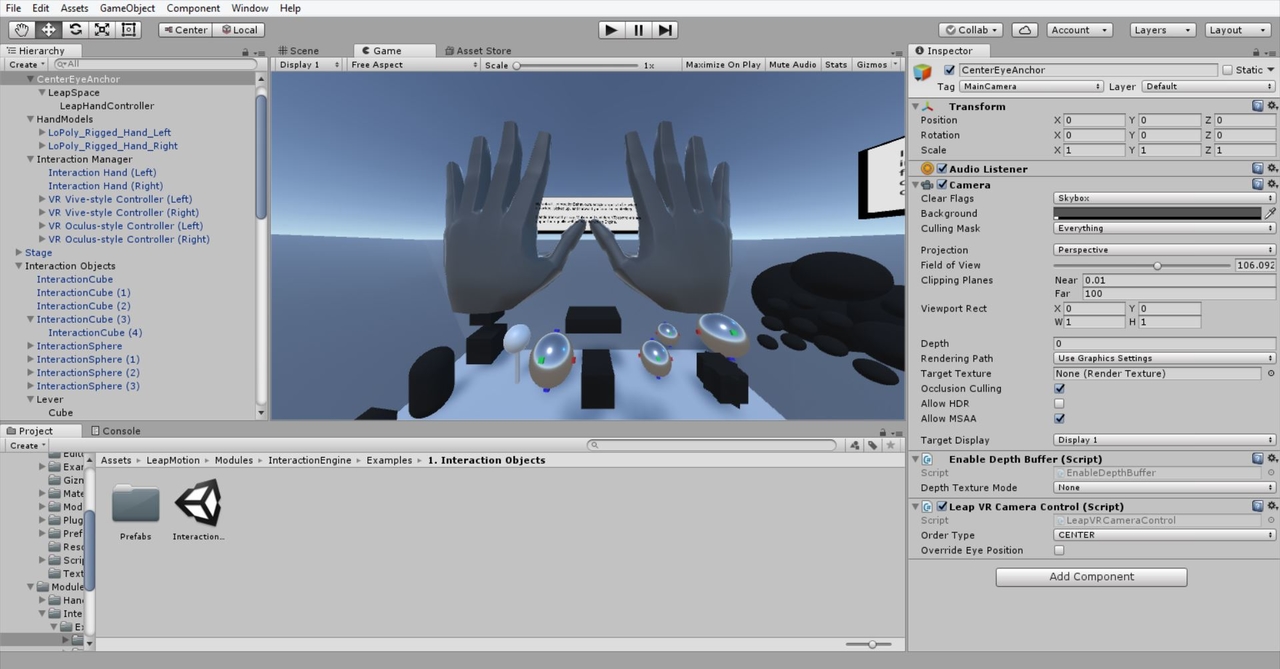
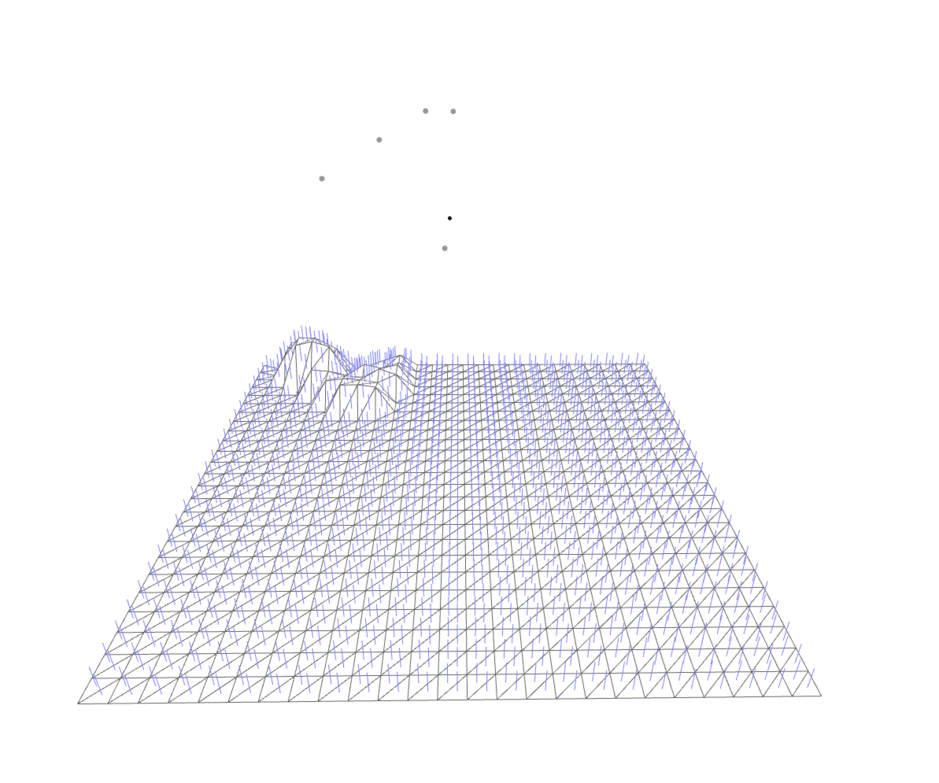
1) Interface.
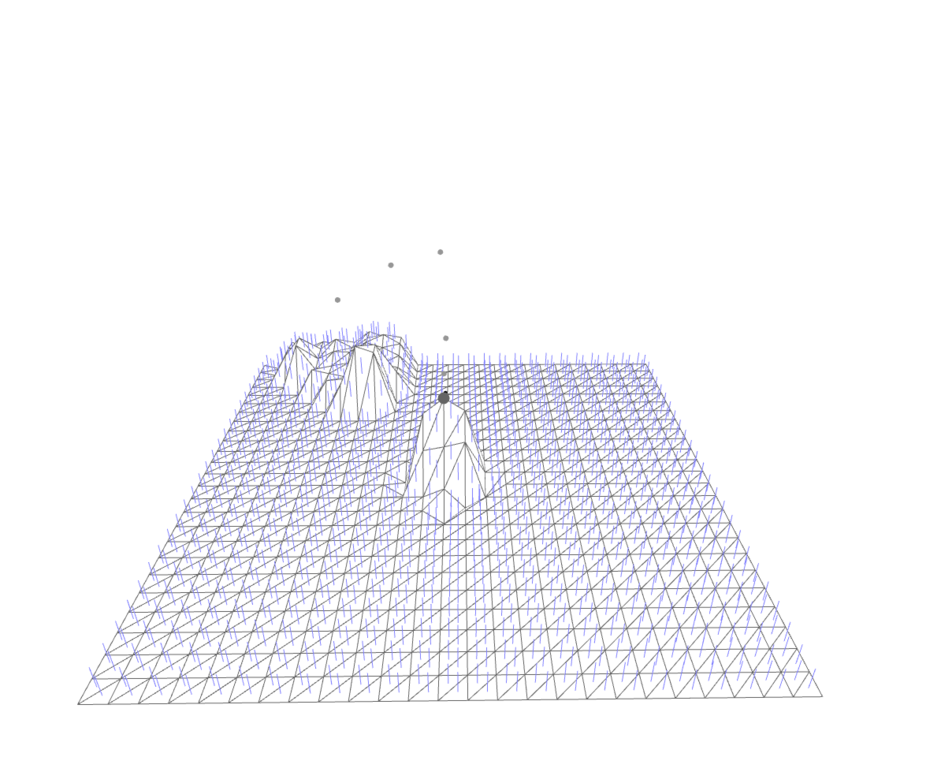
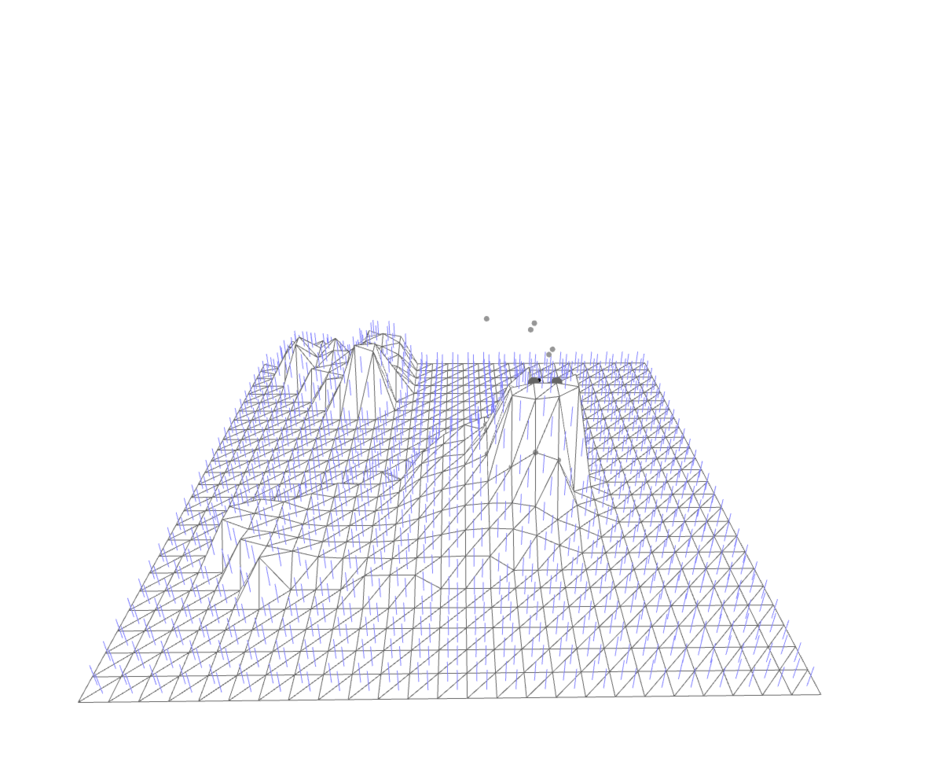
A Leap Motion VR sensor will be used to manipulate a digital mesh surface in Unity, with the manipulated mesh visible on a computer monitor. Recent distortions in the mesh geometry will be used to program the ABB120 or ABB7600 arm to move to and heat those locations on a real world surface.
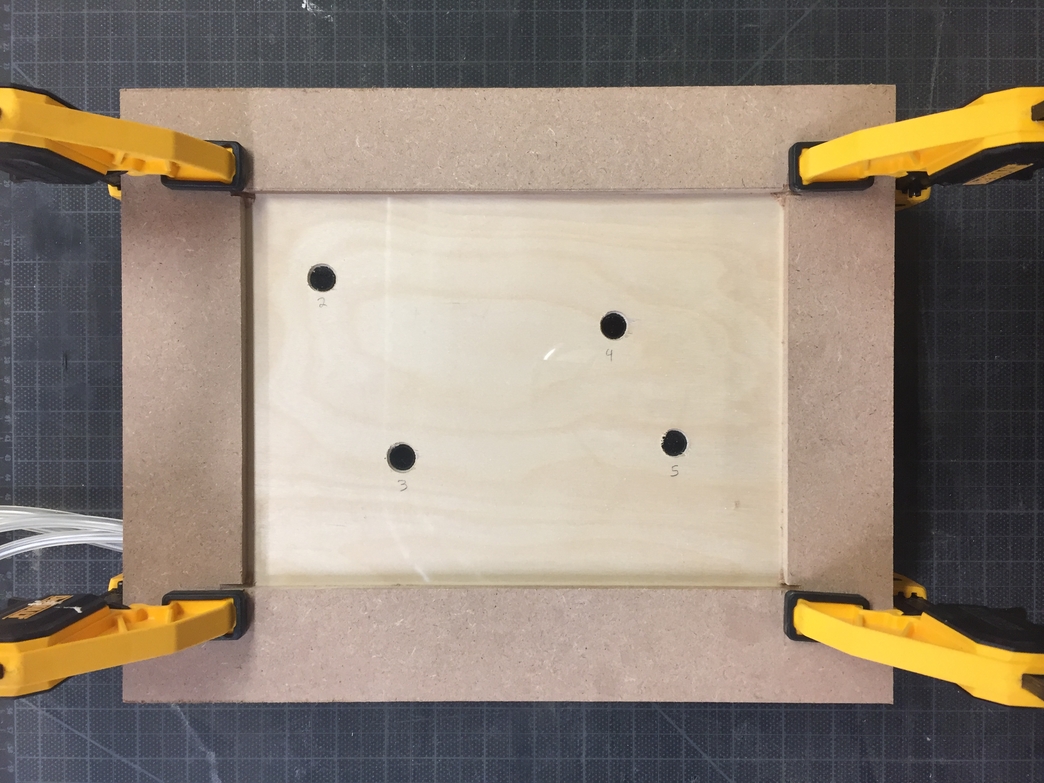
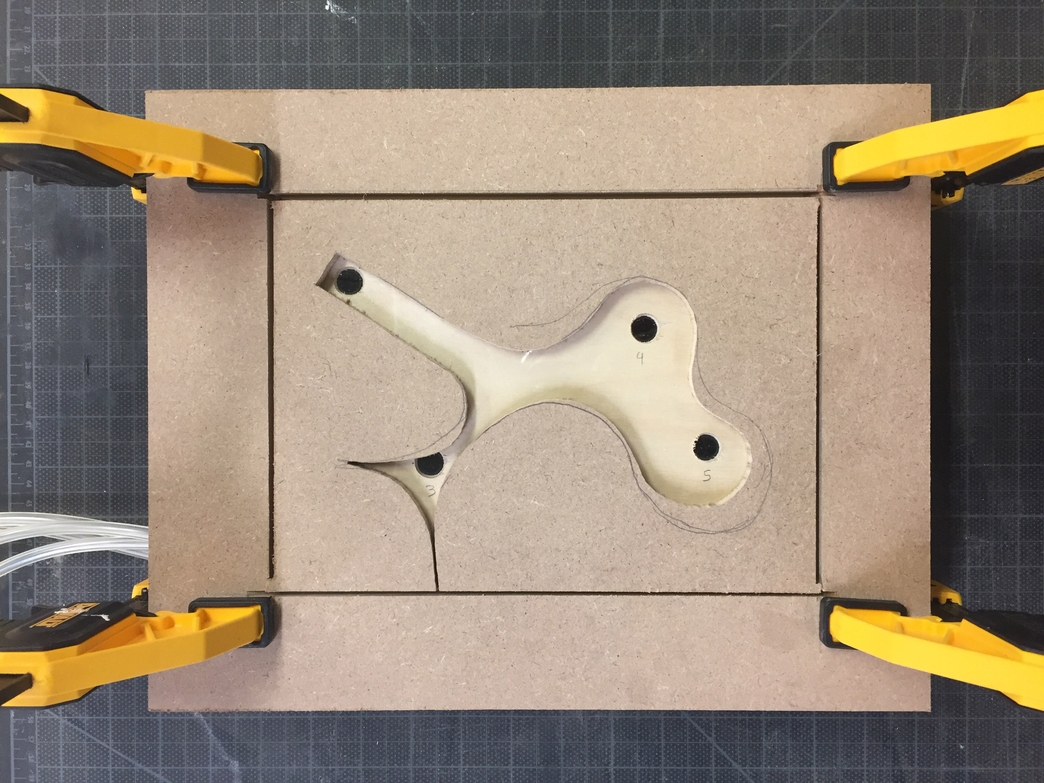
2) Material Testing and Actuation.
Deformation of a plastic sheet through selective heating and pressurization is being explored. Current testing has moved away from point distortion through separate solenoids, and is now using an evenly pressurized air chamber behind the surface. A heat mask is used to control the area of distortion, but will likely shift to a custom heat gun end effector for the robotic arm.
{kind=link}